
Manuels Connexes pour Kuka KR 150-2



Sommaire des Matières pour Kuka KR 150-2
- Page 1 Spezifikation Specification Spécification KR 240- -2 Roboter KR 150- -2 Robots KR 180- -2 KR 240- -2 C KR 210- -2 KR 270- -2 Spez KR 150--2, 180--2, 210--2, 240--2, KR 240--2 C, 270--2 de/en/fr 04.2004.10...
- Page 2 KUKA Roboter GmbH e Copyright Spez KR 150--2, 180--2, 210--2, 240--2, KR 240--2 C, 270--2 de/en/fr 04.2004.10...
-
Page 3: Table Des Matières
-- MIG/MAG--Schweißen grund der besonderen Aufbaugeometrie sehr -- YAG--Laserstrahlschweißen. nahe am Werkstück stehen. Die durchschnittliche Lebensdauer liegt, wie bei allen KUKA--Robotern, Der Roboter KR 240--2 C sowie seine Varianten bei 10 bis 15 Jahren. mit Armverlängerung sind sechsachsige Indu- strieroboter mit Gelenkkinematik für alle Punkt-- Jeder Roboter wird mit einer Steuerung ausgerü-... -
Page 4: Robotermechanik
Die Verbindungsleitungen zwischen Roboter und Bei Robotern der “F”--Variante ist der Arm druck- Steuerung enthalten alle hierfür notwendigen Ver- beaufschlagt. Er wird mit einem Innendruck von sorgungs-- und Signalleitungen. Sie sind am Ro- 0,1 bar betrieben. boter steckbar, auch die Energie-- und Medienlei- In Clean--Room--Umgebung kommt die Variante tungen für den Betrieb von Werkzeugen (Zubehör KR 180 L130--2 CR mit ZH 130 CR zum Einsatz. -
Page 5: Austausch
auf eine ebene und ausreichend glatte Ob- 1.5 Transport erfläche zu achten. Beim Transport des Roboters ist auf die Das Einbringen der Klebedübel muss sehr Standsicherheit zu achten. Solange der Robo- sorgfältig erfolgen, damit die während des ter nicht auf dem Fundament befestigt ist, Betriebs auftretenden Kräfte (Bild 1- -7) sicher muss er in Transportstellung gehalten wer- in den Boden geleitet werden. -
Page 6: Zubehör (Auswahl)
Maße für die Verpackung des Roboters im Contai- 2.4 Arbeitsbereichsüberwachung ner: Standardausführung Robotertyp Die Achsen 1 bis 3 können mit Positionsschaltern (mm) (mm) (mm) oder Initiatoren und Nutenringen, auf denen ver- KR 150--2 1723 1184 1671 stellbare Nocken befestigt sind, ausgerüstet wer- KR 150 L130--2 1923 1184... -
Page 7: Technische Daten
TECHNISCHE DATEN Typen KR 150--2, KR 240--2 KR 150 L130--2, KR 240 L210--2, KR 150 L110--2 KR 240 L180--2 KR 180--2, KR 240--2 C KR 180 L150--2, KR 240 L210--2 C KR 180 L130--2 KR 240 L180--2 C KR 210--2, KR 270--2 KR 210 L180--2 KR 210 L150--2... - Page 8 Robotertyp KR 210--2 KR 210 L180--2 KR 210 L150--2 Zentralhand 210 / 240 kg Nenn--Traglast [kg] Zusatzlast Arm [kg] Zusatzlast Schwinge [kg] Zusatzlast max., Arm und Schwinge [kg] Zusatzlast Karussell [kg] Max. Gesamtlast [kg] Armlänge [mm] 1100 1300 1500 Robotertyp KR 240--2 KR 240 L210--2 KR 240 L180--2...
- Page 9 Robotertyp KR 270--2 Zentralhand 270 kg Nenn--Traglast [kg] Zusatzlast Arm [kg] Zusatzlast Schwinge [kg] Zusatzlast max., Arm und Schwinge [kg] Zusatzlast Karussell [kg] Max. Gesamtlast [kg] Armlänge [mm] 1100 Die Abhängigkeit von Traglast und Lage des Traglastschwerpunkts geht aus Bild 3--2 bis 3--17 hervor. 04.2004.10 Spez KR 150--2, 180--2, 210--2, 240--2, KR 240--2 C, 270--2 de/en/fr...
- Page 10 Achsdaten Traglastschwerpunkt P siehe Bild 3--2 bis 3--17 Die Achsdaten werden auf den folgenden Seiten angegeben. Die Darstellung der Achsen und ihrer Für alle Nennlasten beträgt der horizontale Ab- Bewegungsmöglichkeiten geht aus Bild 1--3 her- stand (Lz) des Traglastschwerpunkts P von der vor.
- Page 11 Schutzart des Roboters Farbe IP65 (nach EN 60529) Roboter betriebsbereit, mit angeschlossenen Fußteil (feststehend) schwarz (RAL 9005) Verbindungsleitungen Bewegliche Teile orange (RAL 2003) Gewichtsausgleich schwarz (RAL 9005) Schutzart der Zentralhand “Standard”, “CR” Bei “F--Variante” zusätzliche Sonderlackierung. IP65 (nach EN 60529) Zentralhand “F”...
- Page 12 Achsdaten KR 150- -2, KR 150 L130- - 2, KR 150 L110- - 2 D Zentralhand, Nenn- -Traglast 150/130/110 kg Achse Bewegungsbereich Geschwindigkeit bei Nenn--Traglast softwarebegrenzt 150 kg 130 kg 110 kg ±185˚ 110 ˚/s 105 ˚/s 105 ˚/s +0˚ 110 ˚/s 110 ˚/s 110 ˚/s...
- Page 13 KR 210- -2, KR 210 L180- - 2, KR 210 L150- - 2 D Zentralhand, Nenn- -Traglast 210/180/150 kg Achse Bewegungsbereich Geschwindigkeit bei Nenn--Traglast softwarebegrenzt 210 kg 180 kg 150 kg ±185˚ 86 ˚/s 86 ˚/s 86 ˚/s +0˚ 84 ˚/s 84 ˚/s 84 ˚/s --146˚...
- Page 14 KR 240- -2 C, KR 240 L210- - 2 C, KR 240 L180- - 2 C D Zentralhand, Nenn- -Traglast 240/210/180 kg Achse Bewegungsbereich Geschwindigkeit bei Nenn--Traglast softwarebegrenzt 240 kg 210 kg 180 kg ±185˚ 86 ˚/s 82 ˚/s 82 ˚/s +0˚...
- Page 15 The KR 240--2 robot including its variants with structural geometry. Like all KUKA robots, they arm extensions (Fig. 1--1) are six--axis industrial have an average service life of 10 to 15 years.
-
Page 16: Robot Design
The connecting cables between the robot and the This variant has been extensively modified to controller contain all the relevant energy supply achieve a substantially reduced level of particle and signal lines. The cable connections on the emission compared with the standard version. robot are of the plug--in type, as too are the energy The robot is additionally fitted with corrosion-- and fluid supply lines for the operation of end... -
Page 17: Interchangeability
1.5 Transportation will be safely transmitted to the ground. Figure 1- -7 could also be used as a basis for It must be ensured that the robot is stable more extensive static investigations. while it is being transported. The robot must remain in its transport position as long as it is 1.4 Interchangeability not fastened to the foundation. -
Page 18: Accessories (Selection)
Dimensions for packing the robot in a container: 2.4 Working range monitoring Robot type Standard version (mm) (mm) (mm) Axes 1 to 3 can be equipped with position switches KR 150--2 1723 1184 1671 or proximity switches and slotted rings to which KR 150 L130--2 1923 1184... -
Page 19: Technical Data
TECHNICAL DATA Types KR 150--2, KR 240--2 KR 150 L130--2, KR 240 L210--2, KR 150 L110--2 KR 240 L180--2 KR 180--2, KR 240--2 C KR 180 L150--2, KR 240 L210--2 C KR 180 L130--2 KR 240 L180--2 C KR 210--2, KR 270--2 KR 210 L180--2 KR 210 L150--2... - Page 20 Robot type KR 210--2 KR 210 L180--2 KR 210 L150--2 In--line wrist 210 / 240 kg Rated payload [kg] Suppl. load on arm [kg] Suppl. load on link arm [kg] Max. supplementary load on arm and link arm [kg] Suppl. load on rot. column [kg] Max.
- Page 21 Robot type KR 270--2 In--line wrist 270 kg Rated payload [kg] Suppl. load on arm [kg] Suppl. load on link arm [kg] Max. supplementary load on arm and link arm [kg] Suppl. load on rot. column [kg] Max. total distributed load [kg] Arm length [mm] 1100 The relationship between the payload and its center of gravity may be noted from Figures 3--2 to 3--17.
- Page 22 Axis data Load center of gravity P see Figures 3--2 to 3--17 The axis data may be noted from the following pages. The axes and their possible motions are For all rated payloads, the horizontal distance (Lz) depicted in Figure 1--3. Axes 1 to 3 are the main of the center of gravity of the payload P from the axes, axes 4 to 6 the wrist axes.
- Page 23 Protection classification IP 65 NOTE: The flange is depicted with all axes of of the robot the robot, particularly axis 6, in the (according to EN 60529) zero position (the symbol ready for operation, indicates the position of the locating with connecting cables plugged in element).
- Page 24 Axis data KR 150- -2, KR 150 L130- - 2, KR 150 L110- - 2 D In- -line wrist, rated payload 150/130/110 kg Axis Range of motion Speed with rated payload software--limited 150 kg 130 kg 110 kg ±185˚ 110 ˚/s 105 ˚/s 105 ˚/s +0˚...
- Page 25 KR 210- - 2, KR 210 L180- - 2, KR 210 L150- - 2 D In- -line wrist, rated payload 210/180/150 kg Axis Range of motion Speed with rated payload software--limited 210 kg 180 kg 150 kg ±185˚ 86 ˚/s 86 ˚/s 86 ˚/s +0˚...
- Page 26 KR 270- -2 D In- -line wrist, rated payload 270 kg Axis Range of motion Speed with rated payload software--limited 270 kg ±185˚ 85 ˚/s +0˚ 79 ˚/s --146˚ +155˚ 77 ˚/s --119˚ ±350˚ 100 ˚/s ±125˚ 100 ˚/s ±350˚ 156 ˚/s Spez KR 150--2, 180--2, 210--2, 240--2, KR 240--2 C, 270--2 de/en/fr 04.2004.10...
-
Page 27: Figures
(contournage) et point l’instar des robots industriels éprouvés des autres par point. Les principaux domaines de mise en séries KUKA, la durée de vie moyenne s’élève à œuvre sont: 10--15 ans. -- Manipulation de pièces avec un préhenseur Chaque robot est doté... -
Page 28: Ensemble Mécanique Du Robot
commande a un encombrement réduit, présente En cas de sollicitations thermiques ou mécani- une grande simplicité de maintenance et autorise ques plus importantes, le poignet en ligne du type une conduite aisée du système. Le niveau de “F” est disponible. Ce poignet est caractérisé par sécurité... -
Page 29: Echange
ATTENTION.- - Dans le cas de la variante 1 et 3, Le robot peut être remis en service après avoir faudra, lors de la préparation réglé le point zéro pour tous les axes. fondations, respecter les prescriptions de Grâce à ces opérations, les programmes construction en vigueur en ce qui concerne la déterminés ainsi peuvent à... -
Page 30: Accessoires (Sélection)
Cotes pour l’emballage du robot dans le 2.4 Surveillance de l’enveloppe conteneur: d’évolution Type de robot Version standard (mm) (mm) (mm) Les axes 1 à 3 peuvent recevoir des fins de course KR 150--2 1723 1184 1671 ou des détecteurs de proximité et des bagues KR 150 L130--2 1923 1184... -
Page 31: Caracteristiques Techniques
CARACTERISTIQUES TECHNIQUES Types KR 150--2, KR 240--2 KR 150 L130--2, KR 240 L210--2, KR 150 L110--2 KR 240 L180--2 KR 180--2, KR 240--2 C KR 180 L150--2, KR 240 L210--2 C KR 180 L130--2 KR 240 L180--2 C KR 210--2, KR 270--2 KR 210 L180--2 KR 210 L150--2... - Page 32 Type de robot KR 210--2 KR 210 L180--2 KR 210 L150--2 Poignet en ligne 210 / 240 kg Charge nominale admissible [kg] Charge suppl. bras [kg] Charge suppl. épaule [kg] Charge suppl. maxi bras et épaule [kg] Charge supplémentaire bâti de rotation [kg] Charge maxi totale [kg] Longueur du bras [mm] 1100...
- Page 33 Type de robot KR 270--2 Poignet en ligne 270 kg Charge nominale admissible [kg] Charge suppl. bras [kg] Charge suppl. épaule [kg] Charge suppl. maxi bras et épaule [kg] Charge supplémentaire bâti de rotation [kg] Charge maxi totale [kg] Longueur du bras [mm] 1100 Les figures 3--2 à...
- Page 34 Caractéristiques des axes Centre de gravité de la charge P voir fig. 3--2 à 3--14 Les caractéristiques des axes sont données sur les pages suivantes. La figure 1--3 fournit une Pour toutes charges nominales, l’écart horizontal représentation axes ainsi (Lz) du centre de gravité de la charge P à la mouvements que ceux--ci sont en mesure surface de la bride s’élève à...
- Page 35 Protection de l’ensemble du robot IP65 REMARQUE.- - La figure de la bride correspond à (selon EN 60529) la position zéro du robot sur tous les opérationnel, avec câbles axes et notamment sur l’axe 6 (le de liaison connectés symbole montre la position de l’élément d’adaptation).
- Page 36 Caractéristiques des axes KR 150- -2, KR 150 L130- - 2, KR 150 L110- - 2 D Poignet en ligne, charge nominale admissible de 150/130/110 kg Plage de mouvement Vitesse avec charge nominale limitation logiciel 150 kg 130 kg 110 kg ±185˚...
- Page 37 KR 210- -2, KR 210 L180- - 2, KR 210 L150- - 2 D Poignet en ligne, charge nominale admissible de 210/180/150 kg Plage de mouvement Vitesse avec charge nominale limitation logiciel 210 kg 180 kg 150 kg ±185˚ 86 ˚/s 86 ˚/s 86 ˚/s +0˚...
- Page 38 KR 270- -2 D Poignet en ligne, charge nominale admissible de 270 kg Plage de mouvement Vitesse avec charge nominale limitation logiciel 270 kg ±185˚ 85 ˚/s +0˚ 79 ˚/s --146˚ +155˚ 77 ˚/s --119˚ ±350˚ 100 ˚/s ±125˚ 100 ˚/s ±350˚...
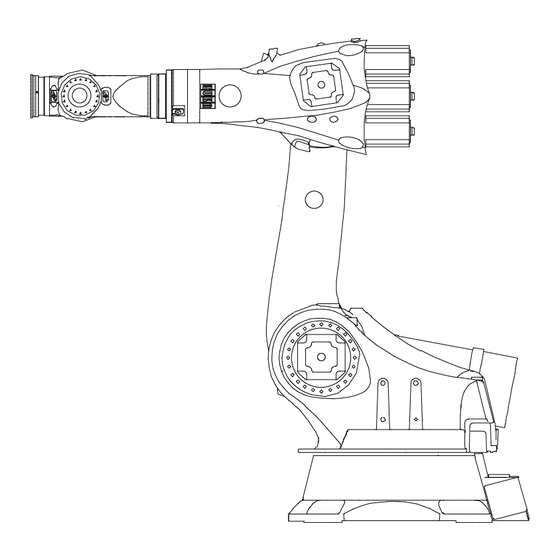
- Page 39 Hand Schwinge Gewichtsausgleichssystem Karussell Grundgestell Wrist Link arm Counterbalancing system Rotating column Base frame Poignet Bras Epaule Système d’équilibrage Bâti de rotation Embase 1- -1 Hauptbestandteile des Roboters Principal components of the robot Sous- -ensembles principaux du robot 1- -3 Drehachsen und Drehsinn beim Verfahren des Roboters 1- -2...
- Page 40 min. Abstand zum Beton- rand 210 mm Minimum distance from edge of concrete 210 mm Ecart minimum avec le bord en béton 210 mm Schnitt A - A Section A - A Coupe A - - A Dübelschraube Fundamentplatte Sechskantschraube M24x70- -8.8- -A2K Roboter Anchor bolt Bedplate...
- Page 41 Schnitt X - - X Section X - - X Coupe X - - X =640 Rz 63 vorn front devant Innensechskantschraube M8x55 Allen screw M8x55 Vis à six pans creux M8x55 Aufnahmebolzen Locating pin Pied de centrage Sechskantschraube ISO 4017 M24x70--8.8 Hexagon bolt ISO 4017 M24x70--8.8 Vis à...
- Page 42 vorn front devant Aufnahmebolzen Locating pin Pied de centrage Klebedübel Chemical anchor Cheville chimique Sechskantschraube Hexagon bolt Vis à tête hexagonale Aufbaugestell Booster frame Plate- -forme 1- -6 Roboterbefestigung, Variante 3 (Aufbaugestell) Installation of the robot, variant 3 (booster frame) Fixation du robot, variante 3 (plate- -forme) Spez KR 150--2, 180--2, 210--2, 240--2, KR 240--2 C, 270--2 de/en/fr 04.2004.10...
- Page 43 Vertikale Kraft 24 000 N vmax Horizontale Kraft 18 000 N hmax Kippmoment 49 000 Nm kmax Drehmoment um Achse 1 38 000 Nm rmax vertical force 24 000 N vmax horizontal force 18 000 N hmax tilting moment 49 000 Nm kmax turning moment about axis 1 38 000 Nm...
- Page 44 Vertikale Kraft 24 000 N vmax Horizontale Kraft 18 000 N hmax Kippmoment 49 000 Nm kmax Drehmoment um Achse 1 38 000 Nm rmax vertical force 24 000 N vmax horizontal force 18 000 N hmax tilting moment 49 000 Nm kmax turning moment about axis 1 38 000 Nm...
- Page 45 1 Bodenroboter, Deckenroboter 1 Installation on floor/ceiling 1 Montage au sol, montage au plafond 2 Bodenroboter, Deckenroboter 2 Installation on floor/ceiling 2 Montage au sol, montage au plafond 3 Deckenroboter 3 Installation on ceiling 3 Montage au plafond 1- -9 Transport des Roboters Transporting the robot Transport du robot...
- Page 46 2- -1 Zusätzliche Linearachse 2- -4 Additional linear axis Aufbaugestell Axe linéaire supplémentaire Booster frame Plate- -forme Max. Gesamtlast Total distributed load Charge totale maxi Zusatzlast Traglast Supplementary Payload load Charge nominale Charge supplémentaire 1, 2, 3 1 Steuerleitung 2 Schlauchleitung 3 Anschluß...
- Page 47 Diese Belastungskurven entsprechen der äußersten Belastbarkeit! Es müssen immer beide Werte (Traglast und Eigenträgheitsmoment) geprüft werden. Ein Überschreiten geht in die Lebensdauer des Geräts ein, überlastet im allgemeinen Motoren und Getriebe und bedarf auf alle Fälle der Rücksprache mit KUKA. IMPORTANT: These loading curves correspond to the maximum load capacity.
- Page 48 Diese Belastungskurven entsprechen der äußersten Belastbarkeit! Es müssen immer beide Werte (Traglast und Eigenträgheitsmoment) geprüft werden. Ein Überschreiten geht in die Lebensdauer des Geräts ein, überlastet im allgemeinen Motoren und Getriebe und bedarf auf alle Fälle der Rücksprache mit KUKA. IMPORTANT: These loading curves correspond to the maximum load capacity.
- Page 49 Diese Belastungskurven entsprechen der äußersten Belastbarkeit! Es müssen immer beide Werte (Traglast und Eigenträgheitsmoment) geprüft werden. Ein Überschreiten geht in die Lebensdauer des Geräts ein, überlastet im allgemeinen Motoren und Getriebe und bedarf auf alle Fälle der Rücksprache mit KUKA. IMPORTANT: These loading curves correspond to the maximum load capacity.
- Page 50 Diese Belastungskurven entsprechen der äußersten Belastbarkeit! Es müssen immer beide Werte (Traglast und Eigenträgheitsmoment) geprüft werden. Ein Überschreiten geht in die Lebensdauer des Geräts ein, überlastet im allgemeinen Motoren und Getriebe und bedarf auf alle Fälle der Rücksprache mit KUKA. IMPORTANT: These loading curves correspond to the maximum load capacity.
- Page 51 Diese Belastungskurven entsprechen der äußersten Belastbarkeit! Es müssen immer beide Werte (Traglast und Eigenträgheitsmoment) geprüft werden. Ein Überschreiten geht in die Lebensdauer des Geräts ein, überlastet im allgemeinen Motoren und Getriebe und bedarf auf alle Fälle der Rücksprache mit KUKA. IMPORTANT: These loading curves correspond to the maximum load capacity.
- Page 52 Diese Belastungskurven entsprechen der äußersten Belastbarkeit! Es müssen immer beide Werte (Traglast und Eigenträgheitsmoment) geprüft werden. Ein Überschreiten geht in die Lebensdauer des Geräts ein, überlastet im allgemeinen Motoren und Getriebe und bedarf auf alle Fälle der Rücksprache mit KUKA. IMPORTANT: These loading curves correspond to the maximum load capacity.
- Page 53 Diese Belastungskurven entsprechen der äußersten Belastbarkeit! Es müssen immer beide Werte (Traglast und Eigenträgheitsmoment) geprüft werden. Ein Überschreiten geht in die Lebensdauer des Geräts ein, überlastet im allgemeinen Motoren und Getriebe und bedarf auf alle Fälle der Rücksprache mit KUKA. IMPORTANT: These loading curves correspond to the maximum load capacity.
- Page 54 Diese Belastungskurven entsprechen der äußersten Belastbarkeit! Es müssen immer beide Werte (Traglast und Eigenträgheitsmoment) geprüft werden. Ein Überschreiten geht in die Lebensdauer des Geräts ein, überlastet im allgemeinen Motoren und Getriebe und bedarf auf alle Fälle der Rücksprache mit KUKA. IMPORTANT: These loading curves correspond to the maximum load capacity.
- Page 55 Diese Belastungskurven entsprechen der äußersten Belastbarkeit! Es müssen immer beide Werte (Traglast und Eigenträgheitsmoment) geprüft werden. Ein Überschreiten geht in die Lebensdauer des Geräts ein, überlastet im allgemeinen Motoren und Getriebe und bedarf auf alle Fälle der Rücksprache mit KUKA. IMPORTANT: These loading curves correspond to the maximum load capacity.
- Page 56 Diese Belastungskurven entsprechen der äußersten Belastbarkeit! Es müssen immer beide Werte (Traglast und Eigenträgheitsmoment) geprüft werden. Ein Überschreiten geht in die Lebensdauer des Geräts ein, überlastet im allgemeinen Motoren und Getriebe und bedarf auf alle Fälle der Rücksprache mit KUKA. IMPORTANT: These loading curves correspond to the maximum load capacity.
- Page 57 Diese Belastungskurven entsprechen der äußersten Belastbarkeit! Es müssen immer beide Werte (Traglast und Eigenträgheitsmoment) geprüft werden. Ein Überschreiten geht in die Lebensdauer des Geräts ein, überlastet im allgemeinen Motoren und Getriebe und bedarf auf alle Fälle der Rücksprache mit KUKA. IMPORTANT: These loading curves correspond to the maximum load capacity.
- Page 58 Diese Belastungskurven entsprechen der äußersten Belastbarkeit! Es müssen immer beide Werte (Traglast und Eigenträgheitsmoment) geprüft werden. Ein Überschreiten geht in die Lebensdauer des Geräts ein, überlastet im allgemeinen Motoren und Getriebe und bedarf auf alle Fälle der Rücksprache mit KUKA. IMPORTANT: These loading curves correspond to the maximum load capacity.
- Page 59 Diese Belastungskurven entsprechen der äußersten Belastbarkeit! Es müssen immer beide Werte (Traglast und Eigenträgheitsmoment) geprüft werden. Ein Überschreiten geht in die Lebensdauer des Geräts ein, überlastet im allgemeinen Motoren und Getriebe und bedarf auf alle Fälle der Rücksprache mit KUKA. IMPORTANT: These loading curves correspond to the maximum load capacity.
- Page 60 Diese Belastungskurven entsprechen der äußersten Belastbarkeit! Es müssen immer beide Werte (Traglast und Eigenträgheitsmoment) geprüft werden. Ein Überschreiten geht in die Lebensdauer des Geräts ein, überlastet im allgemeinen Motoren und Getriebe und bedarf auf alle Fälle der Rücksprache mit KUKA. IMPORTANT: These loading curves correspond to the maximum load capacity.
- Page 61 Diese Belastungskurven entsprechen der äußersten Belastbarkeit! Es müssen immer beide Werte (Traglast und Eigenträgheitsmoment) geprüft werden. Ein Überschreiten geht in die Lebensdauer des Geräts ein, überlastet im allgemeinen Motoren und Getriebe und bedarf auf alle Fälle der Rücksprache mit KUKA. IMPORTANT: These loading curves correspond to the maximum load capacity.
- Page 62 Diese Belastungskurven entsprechen der äußersten Belastbarkeit! Es müssen immer beide Werte (Traglast und Eigenträgheitsmoment) geprüft werden. Ein Überschreiten geht in die Lebensdauer des Geräts ein, überlastet im allgemeinen Motoren und Getriebe und bedarf auf alle Fälle der Rücksprache mit KUKA. IMPORTANT: These loading curves correspond to the maximum load capacity.
- Page 63 bis/to/à A4/A5 8,5 +0,3 R 190 tief/deep/prof. ¦ 8 Passungslänge/Fitting length/ Longueur d’adaption 15 Gewindetiefe/Depth of thread/ Prof. du pas Befestigungsschrauben M10, Qualität 10.9 Einschraubtiefe: min. 12 mm, max. 14 mm Fastening screws M10, quality 10.9 Depth of engagement: min. 12 mm, max. 14 mm Vis de fixation M10, qualité...
- Page 64 Ansicht A View A Vue A Für die Nullpunkt- -Einstellung mit dem elektronischen Messtaster (siehe Abschnitt 2.6) bei angebautem Werkzeug muss dieses so gestaltet sein, dass genügend Platz für Ein- - und Ausbau des Messtasters bleibt. For zero adjustment with the electronic probe (see Section 2.6) when the tool is mounted, the latter must be designed to allow sufficient space for installation and removal of the probe.
- Page 65 Traglastschwerpunkt P Zusatzlast / Supplementary load Load center of gravity P Charge supplémentaire Centre de gravité charge P +155° - -119° - -146° +0° Störkantenradius des Anbauflansches Interference radius of the mounting flange Rayon bords perturbateurs bride de fixation ---185˚ HINWEIS: Zusatzlast- -Schwerpunkt muss im Bereich der A 3 liegen.
- Page 66 0° --- 133° +155° --- 119° Störkantenradius des Anbauflansches Interference radius of the mounting flange Rayon bords perturbateurs bride de fixation ---185˚ HINWEIS: Zusatzlast- -Schwerpunkt muss im Bereich der A 3 liegen. Bezugspunkt für den Arbeitsbereich ist der Schnittpunkt der Achsen 4 und 5.
- Page 67 Achse 3 (Arm) Axis 3 (arm) Axe 3 (bras) Ansicht Z siehe Bild 3- -20, 21 View Z see Figure 3- -20, 21 Vue Z voir figure 3- -20, 21 M12x18 (4x) bis/to/jusqu’à --95° X = 125 mm M8x8 (2x) X = 100 mm bis/to/jusqu’à...
- Page 68 E- -Mail: info@kuka.com.my 49/9--10 Soi Kingkaew 30, Cidade Satélite, Guarulhos Kingkaew Road CEP 07224 240 KUKA de México S. de R.L. de C.V. T. Rachatheva, A. Bangpli São Paulo, SP, Brasil Rio San Joaquin # 339, Local 5 Samutprakarn, 10540 Thailand Tel.: +55 11 6413--4900...