
Manuels Connexes pour PS Automation PS-AMS PSQ Serie

Sommaire des Matières pour PS Automation PS-AMS PSQ Serie
- Page 1 Notice de mise en service PS-AMS Série PSQ Sous réserve de modifications ! Version 2021/09/06 ©2021 PS Automation GmbH ...
-
Page 2: Table Des Matières
Sommaire 1. Symboles utilisés et sécurité .......................... 3 2. Utilisation conforme ............................ 4 3. Stockage ................................ 4 4. Conditions d'utilisation et position de montage .................... 4 4.1 Conditions d'utilisation ............................. 4 4.2 Position de montage ............................ 5 5. Fonctionnement .............................. 6 6. Fonctionnement manuel ............................. 6 7. Montage mécanique ............................ 7 7.1 Consignes de sécurité ............................ 7 7.2. Montage sur vanne PSQ103‐1503AMS ...................... 7 7.3 Montage sur vanne PSQ2003/2803AMS ...................... 8 8. Raccordement électrique ............................ 8 8.1 Consignes de sécurité ............................ 8 8.2 Variantes de raccordement .......................... 9 8.3 Raccordement sur la carte principale et le connecteur .................. 9 8.3.1 Raccordement au réseau électrique ...................... 9 8.3.2 Entrées ................................. 13 8.3.2.1 Valeur de consigne avec séparation galvanique .................. 13 8.3.2.2 Valeur de mesure process pour mode régulateur (en option) .............. 13 8.3.2.3 Entrées binaires avec séparation galvanique .................... 13 ... -
Page 3: Symboles Utilisés Et Sécurité
1. Symboles utilisés et sécurité Risques encourus en cas de non respect des consignes de sécurité Les servomoteurs PS‐AMS PSQ sont fiables et conformes aux réglementations. Ils peuvent toutefois représenter un danger s'ils ne sont pas installés et mis en route par du personnel formé et/ou compétent ou en cas d'utilisation incorrecte ou non conforme. Exemples de risques encourus Danger de mort ou de blessure de l'utilisateur ou d'un tiers, Dommages matériels pour l'utilisateur, Dégradation de la sécurité et du fonctionnement du servomoteur. Il est important de s'assurer que toute personne intervenant au niveau du montage, de la mise en service, de l'utilisation, de l'entretien et de la réparation des servomoteurs ait lu et compris cette notice, en particulier le chapitre Sécurité. Travailler en respectant les règles de sécurité Les servomoteurs doivent exclusivement être mis en route par du personnel formé et habilité à le faire. Les consignes de sécurité mentionnées dans cette notice, les réglementations nationales applicables en matière de prévention des accidents, ainsi que les éventuelles consignes de sécurité, de fonctionnement et d'utilisation internes doivent être respectées. Les procédures d'arrêt indiquées dans la notice doivent être respectées pour tous les travaux, tels que l'installation, la mise en service, la préparation, le fonctionnement, la modification des conditions de fonctionnement et les modes de fonctionnement, ainsi que l'entretien, le contrôle et la réparation. Débrancher le servomoteur du réseau et s'assurer qu'il ne peut être remis sous tension involontairement avant chaque ouverture du capot. Avant de travailler sur des parties susceptibles d'être raccordées au réseau, s'assurer qu'elles sont hors tension. Il convient de s'assurer que les servomoteurs utilisés sont en bon état de fonctionnement. Des vices ou dommages visibles extérieurement ainsi que des altérations de fonctionnement susceptibles de porter atteinte à la sécurité doivent immédiatement être signalés. Indications de danger Les symboles suivants sont utilisés dans la présente notice : ... -
Page 4: Autres Avertissements
Autres avertissements En cas d'entretien, de contrôle et de réparation tout de suite après une période de fonctionnement, les surfaces du moteur risquent d'être très chaudes. Risque de brûlure ! En cas d'équipement ultérieur et d'utilisation du servomoteur avec des accessoires PS, se conformer aux notices d'utilisation fournies. Les raccords de sortie et d'entrée des signaux sont isolés des circuits électriques susceptibles d'entraîner une électrocution avec une double isolation. 2. Utilisation conforme Les servomoteurs quart de tour PS‐AMS PSQ sont conçus pour une utilisation en tant que servomoteurs électriques exclusivement. Ils sont destinés au montage sur des vannes et leurs commandes moteur. Toute autre utilisation n'est pas conforme. Le fabricant ne peut être tenu responsable des dommages en résultant. Les servomoteurs ne doivent pas être utilisés au‐delà des valeurs limites indiquées dans la fiche, le catalogue et/ou la documentation technique. Le fabricant ne peut être tenu responsable des dommages résultant d'une utilisation non conforme. L'utilisation conforme inclut également le respect des conditions de fonctionnement, de maintenance et d'entretien préconisées par le fabricant. Le montage et la configuration du servomoteur ainsi que son entretien ne font pas partie des utilisations conformes. Des mesures de sécurité plus strictes doivent être prises dans ce cas. Les servomoteurs doivent exclusivement être utilisés et entretenus par du personnel formé et informé des dangers que cela représente. Les réglementations nationales applicables en matière de prévention des accidents doivent être respectées. Le constructeur décline toute responsabilité en cas de modification apportée sans son agrément. La tension d'alimentation ne peut être raccordée qu’après la fermeture correcte du capot ou du bornier. 3. Stockage Pour un stockage approprié, les points suivants doivent être observés : Stockage dans des locaux bien ventilés et secs uniquement Stockage sur étagère, caillebottis en bois afin de le protéger contre l'humidité du sol ... -
Page 5: Position De Montage
PSQ103‐1503AMS PSQ2003/2803AMS figure 1: Cotes d’encombrement et de montage Type de A B C D E F G H I ... -
Page 6: Fonctionnement
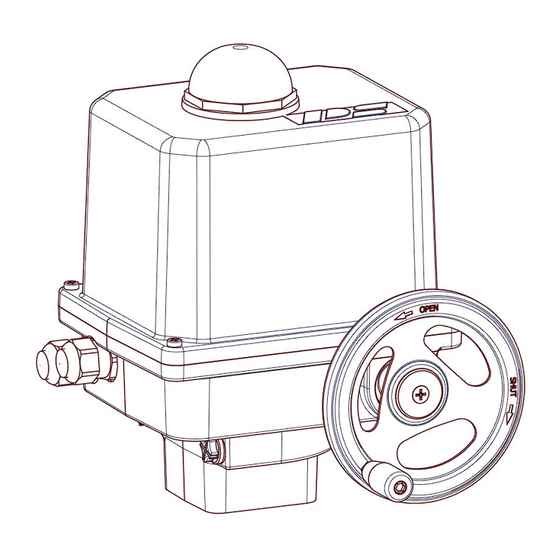
5. Fonctionnement Les servomoteurs PS‐AMS PSQ sont conçus pour une utilisation en tant que servomoteurs électriques. Une bride de montage ISO 5211 ainsi qu'une douille d'entraînement interchangeable avec profil interne adapté à l'arbre de la vanne permettent le raccordement mécanique avec la vanne. Un moteur à courant continu 24 Volts commandé par un système électronique utilisant une modulation de largeur d'impulsions (PWM) fournit la puissance mécanique. Le retour de position codé est obtenu au moyen d'un potentiomètre haute précision. Le couple moteur est transmis à un engrenage planétaire par une transmission intermédiaire à pignon droit. Une couronne actionne la douille d'entraînement à profil extérieur crénelé. En cas de coupure d'alimentation et lors de travaux de réglage, il est possible d'utiliser le volant pour passer en fonctionnement manuel en urgence (voir chapitre 6 ‐ Fonctionnement manuel), ceci sauf si la position de sécurité PSCP est activée. 6. Fonctionnement manuel Les entraînements sont assurés par un volant fourni désassemblé. Tout d’abord, le volant et la manivelle doivent être montés comme l’indique la figure 3. figure 3: Montage du volant ... -
Page 7: Montage Mécanique
Attention ! Lors du fonctionnement du moteur, il ne faut pas tourner le volant, car l’entraînement tente alors de réguler la déviation de la position en fonction du mode de fonctionnement. Si la protection contre les pannes de courant PSCP (option) est installée, l’actionnement manuel est impossible, car l’entraînement retourne en position Failsafe. 7. Montage mécanique 7.1 Consignes de sécurité Danger mécanique sur les parties actionnées électriquement ! Les servomoteurs électriques peuvent entraîner un écrasement des doigts et l'endommagement du servomoteur et/ou de la vanne. Lors du montage mécanique du servomoteur, utiliser exclusivement le volant manuel pour la mise en route. Ne pas utiliser l'alimentation électrique ! ... -
Page 8: Montage Sur Vanne Psq2003/2803Ams
7.3 Montage sur vanne PSQ2003/2803AMS Pour le raccordement mécanique entre la vanne et l’entraînement, les entraînements sont dotés de la bride F16 conforme à la norme ISO 5211. Le raccordement à l’arbre de vanne s’effectue par le biais d’un double carré de 55. À la livraison, l’entraînement comporte une transmission auxiliaire et un entraînement proprement dit (déjà prémonté). Vérifier la position de l’entraînement à l’aide de l’indicateur de position sur la transmission auxiliaire et ajuster le plus précisément possible la position actuelle de la vanne à l’aide du volant. Pour que l’ajustement soit optimal, la vanne doit se trouver en fin de course ouverte ou fermée. L’entraînement doit alors être déplacé ... -
Page 9: Variantes De Raccordement
8.2 Variantes de raccordement Le PS‐AMS PSQ est disponible avec deux variantes de raccordement, au choix. Raccordement sur carte : Le raccordement électrique est effectué sur la carte principale, dans le servomoteur. Le capot du servomoteur doit être retiré pour procéder au raccordement. Raccordement sur connecteur : Le raccordement électrique est effectué sur un boîtier de connexion monté séparément sur le servomoteur. Le couvercle du boîtier avec la partie connecteur doit être retiré lors du premier raccordement. Immobiliser les câbles de raccordement dans les bornes à vis à l'arrière du module de connexion. 8.3 Raccordement sur la carte principale et le connecteur 8.3.1 Raccordement au réseau électrique Couper l'alimentation électrique. S'assurer qu'aucune connexion accidentelle ne peut se produire 9 ... - Page 10 Raccordement sur la carte : Raccordement sur le connecteur : figure 7: Ouverture du capot figure 9: Ouverture du couvercle Ouvrir le capot. Faire passer le câble dans les passe‐ Détacher le couvercle du boîtier de connexion. câbles à vis à l'intérieur du servomoteur. Module de connexion 14 ...
- Page 11 figure 11: Raccordement électrique sur la carte principale ...
- Page 12 ...
-
Page 13: Entrées
8.3.2 Entrées 8.3.2.1 Valeur de consigne avec séparation galvanique Les bornes 1 à 3 permettent le raccordement de la consigne paramétrable en mode régulation, dans la plage 0‐20 mA ou 0‐10 V. 8.3.2.2 Valeur de mesure process pour mode régulateur (en option) Les bornes 15 à 17 (carte principale) ou 10 à 12 (boîtiers de connexion) permettent de raccorder la mesure du capteur paramétrable pour la plage 0‐20 mA ou 0‐10 V pour le mode régulateur (en option). Attention ! Les entrées binaires décrites ci‐après (8.3.2.3 et 8.3.2.4) sont prioritaires sur la valeur de consigne : si le servomoteur est paramétré en mode régulateur, il ne suit pas la valeur de consigne lorsque des signaux binaires sont activés. Il se replace seulement dans la position correspondant à la consigne après la coupure du signal. 8.3.2.3 Entrées binaires avec séparation galvanique Les signaux Ouvert/Fermé binaires sont raccordés aux bornes 9 à 11 (carte principale) ou 17 à 19 (boîtiers de connexion). En standard, ces entrées sont prévues pour le raccordement de 24 V, sur demande pour 115/230 V. Voir le schéma de raccordement. Dans ce cas, le servomoteur fonctionne en mode 3 points. 8.3.2.4 Entrée binaire Fail safe (en option) Avec une tension de 24 V, le servomoteur peut être placé dans une position de sécurité préréglée via l'entrée Fail safe en option des bornes 12 et 13 (carte principale) ou 25 et 26 (boîtier de connexion). 8.3.3 Sorties 8.3.3.1 Recopie de position continue La valeur réelle de position paramétrable peut être reliée aux bornes 4 à 6, dans la plage 0‐20 mA ou 0‐10 V. Voir également "10.1 Modes de fonctionnement en fin de course" ! 8.3.3.2 Contact de position intermédiaire (option) Le seuil de commutation des deux contacts de position (en option) peut être réglé manuellement au moyen de cames. Les contacts peuvent être utilisés comme contacts inverseurs sans potentiel. Les commutateurs standard sont prévus pour maximum 230 V CA/5 A. Des commutateurs spéciaux pour faible puissance (jusqu'à 100 mA et 30 V) sont disponibles sur demande. Carte de contact de fin de course : bornes X6 / 1‐3 ou X6 / 4‐6 Boîtier de connexion : bornes 22/27/28 ou 23/29/30 8.3.3.3 Alimentation en tension du capteur process (option) Cette sortie fournit une tension variable de 24‐30 V CC, maximum 100 mA, pour l'alimentation d'un capteur process en mode régulateur (option). Carte principale : bornes 14 + 17 Boîtier de connexion : bornes 9 + 12 8.3.3.4 Relais de signalisation de défaut ... -
Page 14: Interface Bus De Terrain (Option)
8.3.4 Interface bus de terrain (option) Une interface bus de terrain est disponible en option pour les servomoteurs PS‐AMS, avec raccordement sur un répartiteur ou un connecteur existant. ‐> Voir le mode d'emploi spécifique du bus de terrain PS‐AMS. 8.4 Accessoires 8.4.1 Résistance chauffante pour platine de commande (option) Les servomoteurs PS‐AMS PSQ peuvent être équipés d'une résistance chauffante pour platine de commande en option. Lors d'une utilisation à l'extérieur, il est recommandé d'utiliser cette option pour éviter la condensation à l'intérieur du servomoteur lorsque la température est très fluctuante ou l'humidité ambiante élevée. La résistance chauffante pour platine de commande via l'alimentation réseau du servomoteur. Il n'est donc pas nécessaire de le raccorder séparément au réseau. Si la résistance de chauffage est installée ultérieurement, le raccordement doit être effectué sur les bornes de la carte principale comme indiqué sur le schéma ci‐contre. ... -
Page 15: Voyant De Fonctionnement / Éléments De Commande / Communication
3 Les cames de commutation permettant d'actionner 2 3 les commutateurs sont placées sur l'arbre de commande de chaque limiteur de couple et peuvent X6 être réglées au moyen d'un tournevis à lame plate. Pour ce faire, utiliser le support (3) comme appui. Sur les servomoteurs qui se ferment en tournant dans le sens horaire, la came inférieure (1) actionne le commutateur de fermeture et la came supérieure 1 (2) actionne d'ouverture. figure 18: Réglage des cames de commutation ... -
Page 16: Fonctionnement
10. Fonctionnement Pendant le fonctionnement, tous les paramètres internes, comme par exemple le couple moteur nécessaire et la position actuelle, ainsi que les états de fonctionnement du servomoteur sont contrôlés en permanence. Cela permet de garantir que le servomoteur fonctionne avec une précision optimale et que la vanne est toujours correctement fermée. Des écarts peuvent être constatés avec le logiciel PSCS ou le pilotage local PSC.2 (voir les modes d'emploi correspondants), ou être transmis au poste de commande via les paramètres réglables du relais de signalisation de défaut. Cela garantit une sécurité maximale de l'installation. Le contact de fin de course du servomoteur AMS peut être réglé de façon optimale selon les caractéristiques de la vanne grâce au logiciel PSCS (via un câble de données spécial). Cela entraîne différents comportements du servomoteur. Le relais de signalisation de défaut paramétrable ou le logiciel de communication PSCS peut indiquer si une position de fin de course est dépassée ou n'est pas atteinte. 10.1 Déclenchement par limiteur de couple Le servomoteur active le couple de rotation maximal à chaque fin de course. Lorsque la butée se décale au niveau de la vanne, par exemple lorsqu'un joint de siège est usé, le servomoteur se déplace jusqu'au point de fermeture sur sa course possible. 10.2 Déclenchement par fin de course automatique Le servomoteur conserve la position de fin de course mesurée sur la butée mécanique lors de la mise en service automatique. Si la butée se décale au niveau de la vanne ou du servomoteur, le servomoteur ne se déplace PAS jusqu'au point de fermeture, mais reste toujours à la position initialement utilisée. 10.3 Déclenchement par fin de course Le servomoteur conserve la position de fin de course définie lors de la mise en service manuelle. Cette position de fin de course est définie indépendamment des butées de la vanne ou du servomoteur. 11. Mise en service A la livraison, le servomoteur est "non initialisé" (la diode verte clignote lentement). Dans cet état, il ne réagit pas à la consigne ni à d'autres commandes de déplacement. Le servomoteur doit impérativement être installé sur une vanne avant d'être mis en service. En fonction des modes de déclenchement mentionnés à la section 10, l'appareil peut être mis en service de l'une des manières suivantes : ‐ Mise en service automatique lorsqu'au moins un contact limiteur de couple ou fin de course est enclenché . ‐ Mise en service manuelle avec déclenchement sur les deux positions de fin de course. Respecter les consignes suivantes. Attention! Le servomoteur doit être monté sur une vanne avant tout actionnement électrique ! ... -
Page 17: Mise En Service Automatique
11.1 Mise en service automatique Elle peut être utilisée lorsqu'au moins un contact limiteur de couple ou fin de course est paramétré. Lors de la mise en service automatique, le servomoteur balaie automatiquement l'angle de rotation ou la course réglés de la vanne. Les paramètres spécifiques à la vanne sont alors mesurés et les valeurs obtenues sont enregistrées dans le servomoteur. Les signaux de consigne et de mesure sont ensuite adaptés en conséquence. Pour effectuer la mise en service automatique, une butée mécanique doit au moins être utilisée en fin de course (en général sur la position Fermée). Elle est soit installée en usine sur la vanne soit réglée au moyen des vis de butée du servomoteur (avec le déclenchement "par fin de course automatique" uniquement). 11.1.1 Réglage de la fin de course mécanique PSQ103‐1503AMS Pour limiter mécaniquement l’angle de basculement de l’entraînement, le système est doté de deux butées de fin de course mécaniques réglables. Lors du réglage des fins de course mécaniques, le servomoteur peut uniquement être actionné à l'aide du volant manuel. Ne pas utiliser l'électricité. Retirez les capuchons de protection (figure 22; pos. 3) des deux vis de réglage. Dévissez les deux vis à six pans creux d’env. 5 tours. Faites tourner l'entraînement dans le sens des aiguilles d'une montre sur le volant jusqu'à ce que la vanne soit fermée. ... -
Page 18: Procédure De Mise En Service
11.1.3 Procédure de mise en service Vérifier que les raccordements mécanique et Touche de mise en service électrique sont correctement effectués. Mettre sous tension. Maintenir la touche de mise en service enfoncée pendant environ 3 secondes avec un outil non conducteur. figure 24: Touche de mise en service Attention! Le servomoteur se déplace maintenant sur la totalité de la course! ... -
Page 19: Neutralisation De La Fin De Course Mécanique
11.1.4 Neutralisation de la fin de course mécanique Uniquement pour les vannes sans butée mécanique de position fermée En fonctionnement normal, le servomoteur ne doit pas s’arrêter sur sa butée mécanique interne. Si la mise en service automatique a été réalisée en utilisant la butée interne du servomoteur, la vis de butée doit impérativement être desserrée d'un tour complet après l'achèvement de la mise en service. Clé six pans figure 26: Neutralisation de la fin de course mécanique 11.1.5 Remarques Remarque Si le servomoteur se bloque lors de la mise en service avant qu'une position de fin de course souhaitée ne soit atteinte, l'appareil mémorise la valeur finale atteinte. Remarque Si aucun seuil de couple de rotation n'est atteint lors de la mise en service automatique ou si la plage d'angle de rotation est inférieure à la valeur minimum admise (en standard 5 mm ou 10°), le processus de mise en service est interrompu. Le servomoteur revient à l'état "non initialisé" (la diode LED verte clignote lentement). C'est également ... -
Page 20: Entretien Et Maintenance
Prudence ! Le servomoteur actionne la vanne sur toute sa course ! Attention ! La course nominale doit être paramétrée sur le servomoteur à l'aide du logiciel de communication PSCS ! ‐> Voir le mode d'emploi du logiciel PSCS Amener la vanne en position fermée par le logiciel PSCS ou le pilotage local PSC.2 via le menu "Mise en service manuelle". La position ouverte du servomoteur est calculée selon la course nominale paramétrée au préalable. Le servomoteur est prêt à être utilisé après la mise en service manuelle. La diode verte reste allumée. Remarque Si la course/l'angle de rotation nominal(e) souhaité n'est pas atteint à partir de la position fermée réglée, la course doit être réduite. 12. Entretien et maintenance Les servomoteurs ne nécessitent aucun entretien lorsqu'ils sont utilisés conformément aux instructions du mode d'emploi. Les mécanismes d'entraînement sont graissés à vie et ne requièrent aucun regraissage ultérieur. Les servomoteurs doivent être nettoyés à sec et sans produit détergent. Utiliser un chiffon doux sans substances abrasives. 13. Consignes de sécurité pour le transport Lors du transport et du stockage, boucher les passe‐câbles et les brides de raccordement pour éviter la pénétration d'humidité et de corps étrangers. Utiliser un emballage approprié pour éviter d'endommager la peinture du servomoteur et le couvercle de l'indicateur de position. Le volant manuel doit être retiré pour le transport. 20 ... -
Page 21: Accessoires
14. Accessoires Contact de fin de Contact de fin de course supplémentaire sans potentiel avec course 2WE contacts argent (courant de commutation 0,1 A ‐ 5 A) supplémentaire Contact de fin de 2WE Contact de fin de course supplémentaire sans potentiel avec course supp. or or contacts or (courant de commutation 0,1 mA ‐ 100 mA) Entrées binaires 115‐230 V Tension d'entrée 115‐230 V CA CA* Position de sécurité Position de sécurité en cas de coupure d'alimentation par super en cas de coupure PSCP condensateurs, position de sécurité Ouverte, Fermée ou une d'alimentation * ... -
Page 22: Alarmes D'état
15. Alarmes d'état 15.1 Relais de signalisation de défaut Le relais de signalisation de défaut (contact NO) permet de recevoir les notifications de défaut et d'états de fonctionnement sur les bornes sans potentiel 7 et 8 (lors du raccordement sur la carte principale) ou 20 et 21 (lors du raccordement sur un boîtier de connexion) avec une charge maximale de 24 V CC / 100 mA pour le signal du poste de commande. Les alarmes émises peuvent être paramétrées au moyen du logiciel PSCS. ‐> Voir le mode d'emploi du logiciel PSCS. 15.2 Dépannage LED rouge LED verte Etat Cause possible Proposition de solution Le servomoteur ne 1) Aucune tension 1) Vérifier le raccordement au ... - Page 23 LED rouge LED verte Défaut au niveau du Proposition de solution Wahrscheinliche Ursache servomoteur Un couple de rotation 1) Le servomoteur n'est pas 1) Recommencer le calibrage. ...
- Page 24 LED rouge LED verte Défaut interne du Cause possible Proposition de solution servomoteur Le servomoteur a Usure et durée de Contacter le service après-vente. ...
-
Page 25: Déclaration De Conformité
16. Déclaration de conformité 25 ... - Page 26 26 ...
- Page 27 27 ...
- Page 28 Nos succursales: Italie Inde PS Automazione S.r.l. Behind Dhiraj Heavy Equipment, Narhe Via Pennella, 94 Industrial Area I‐38057 Pergine Valsugana (TN) Sr No 25, Hissa No. 8, Dambar Plant Road IN‐411048 Narhegaon, Tal. Haveli, Pune Phone: <+39> 04 61‐53 43 67 Phone: <+91> 90 49 99 92 05 Fax: <+39> 04 61‐50 48 62 E‐mail: sales@ps‐automation.in E‐mail: info@ps‐automazione.it www.ps‐automation.in Scannez ce code QR pour trouver les données de contact de toutes les succursales de PS Automation ou visitez notre page de sites sur https://www.ps‐automation.com/ps‐automation/sites/?lang=fr ...