Publicité
Liens rapides
Ces instructions indiquent comment construire le véhicule même robot intelligent de type Arduino. Il
est indiqué comment installer étape par étape le châssis du robot, la carte mère compatible avec Arduino, le
module Shield, les moteurs de réduction (motoréducteurs), le porte piles et les autres accessoires ainsi que
leur système de câblage.
Avec ce projet, vous apprendrez à programmer le système Arduino et sa plateforme d'apprentissage.
Il est à noter que pour assembler ce kit, aucun outil n'est nécessaire car le tournevis est inclus.
Toutes les pièces électriques et électroniques sont connectables ou vissées dans un bornier ou un clema.
Le système de capteurs de lumière infrarouge qui sont montés sur la base de la partie avant, détecte
la ligne noire que vous avez dessinée sur le sol avec un ruban adhésif formant un itinéraire. Le robot intelligent
suivra parfaitement le chemin tracé aussi compliqué ou long qu'il soit.
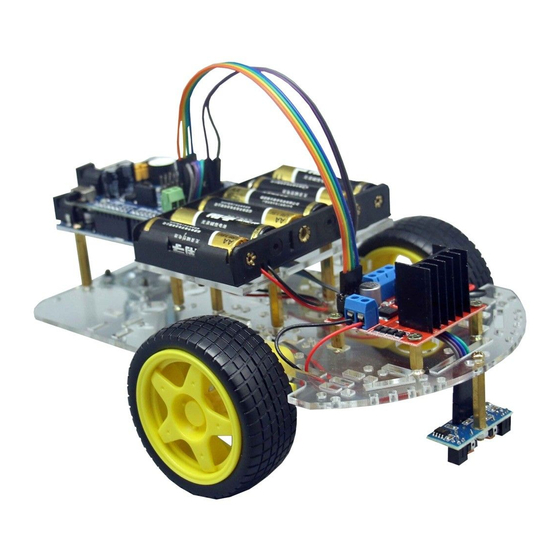
Robot avec système infrarouges suiveur de ligne
Vues du robot assemblé (sous tous les angles)
www.cebekit.es
Système
Arduino
sat@fadisel.com
C-9875
Publicité

Manuels Connexes pour CEBEKIT C-9875




Sommaire des Matières pour CEBEKIT C-9875
- Page 1 C-9875 Robot avec système infrarouges suiveur de ligne Système Arduino Ces instructions indiquent comment construire le véhicule même robot intelligent de type Arduino. Il est indiqué comment installer étape par étape le châssis du robot, la carte mère compatible avec Arduino, le module Shield, les moteurs de réduction (motoréducteurs), le porte piles et les autres accessoires ainsi que...
- Page 2 C-9875 www.cebekit.es sat@fadisel.com...
- Page 3 C-9875 LISTE DU CONTENU DU Liste du matériel Nº Nome Spécifications Qté. Nº Nom Spécifications Qté. Plaque base de contrôle Type Arduino UNO R3 14 Séparateur métallique M3 x 10 mm Module Shield Interface pour la 15 Câble avec connecteurs...
- Page 4 C-9875 INSTALLATION ET MONTAGE Étape 1 : Châssis pour le robot de type Arduino Nous utiliserons: (1)Châssis acrylique pour robot intelligent (2)Support acryliques pour les moteurs (3) Motoréducteur avec double axe et câbles (4)Roue Ø65mm avec pneu en caoutchouc (5)Vis M3×30 mm (6)Écrous M3...
- Page 5 C-9875 Motoréducteurs avec double axe Figure 1 – 3: ( A ) Emplacement des rainures où il faut insérer les supports acryliques des moteurs ( B ) Supports acryliques des moteurs ( C ) Vis et écrous pour fixer les moteurs aux supports Téton sortant...
- Page 6 C-9875 Montage des supports et fixation des moteurs Figure 1- 6: Important Le châssis n’est pas symétrique. Si vous l’assemblez à l’envers il vous sera impossible d’installer la plaque du circuit de contrôle. Cette image montre le châssis vu depuis le coté...
- Page 7 C-9875 Figure 1- 9: Ensuite placer une vis et un écrou dans le trou supérieur et un autre dans le trou inférieur. Voir image ci-contre L’écrou inférieur ne tournera pas une fois la vis serrée car il est en butée avec le châssis.
- Page 8 C-9875 Roue libre robotique Fixer la roue avec des vis M3×8 et les écrous M3, comme l’indiquent les figures suivantes Figure 1- 11:Trous où doit être fixée la roue Figure 1- 12:Roue dans sa position avant sa fixation www.cebekit.es sat@fadisel.com...
- Page 9 C-9875 Figure 1- 13:Les écrous sont placés sur la partie inférieure du châssis Figure 1- 14:Insérer les deux grandes roues à pression, sur l’axe extérieur de chaque motoréducteur Vue inférieure du châssis www.cebekit.es sat@fadisel.com...
- Page 10 C-9875 ATTENTION : Débrancher les modules. Nous utiliserons : (1) Plaque de base contrôle type Arduino (2)Module Shield les roues montées La plaque de base de type Arduino est fournie assemblée avec le module Shield afin de ne pas endommager les connecteurs.
- Page 11 C-9875 Étape 2. Circuit électronique de contrôle principal, type Arduino Uno Nous utiliserons: (1)Châssis robotique intelligent avec toutes (2)Module type Arduino Uno les roues montées (3)Vis M3×8 mm (4)Séparateurs métalliques M3 × 25mm (5)Outil nécessaire : Tournevis: Destornillador Figure 2- 1:Pièces nécessaires pour installer le circuit de contrôle principal www.cebekit.es...
- Page 12 C-9875 Figure 2- 2:Fixer les quatre séparateurs cylindriques comme l’indique la figure Figure 2- 3:Circuit principal de contrôle indiquant les quatre points de fixation www.cebekit.es sat@fadisel.com...
- Page 13 C-9875 Figure 2- 4:Circuit de contrôle fixé avec les vis www.cebekit.es sat@fadisel.com...
- Page 14 C-9875 Étape 3:Module Shield (interface) Nous utiliserons: (1)Robot (2)Moulo Shield Figure 3- 1:Installation du module Shield. Connecté à nouveau le module avec précaution sur la plaque base Attention au module Shield et à la plaque base 1.- Avant de les connecter, vérifiez soigneusement la position du module Shield et du connecteur de la plaque base.
- Page 15 C-9875 Étape 4:Porte piles Nous utiliserons: (1)Robot (2)Porte -piles (3)Séparateur métallique M3×25 (4)Vis M3 × 10 mm (5)Plaque acrylique support du porte piles (6)Écrou M3 (7)Outil nécessaire : Tournevis Figure 4- 1:Pièces nécessaires www.cebekit.es sat@fadisel.com...
- Page 16 C-9875 Figure 4- 2: Emplacement des séparateurs Fixation de la plaque acrylique Figure 4- 3: www.cebekit.es sat@fadisel.com...
- Page 17 C-9875 Figure 4- 4: Préparation pour fixer le porte piles Figure 4- 5:Porte piles une fois vissé www.cebekit.es sat@fadisel.com...
- Page 18 C-9875 Étape 5: Circuit de contrôle des moteurs Nous utiliserons: (1)Robot (2)Circuit de contrôle des moteurs (3)Séparateurs métalliques M3×10 (4)Vis M3 × 10 mm (5)Vis M3 × 8 mm (6)Outil nécessaire : Tournevis Figure 5- 1:Pièces que nous utiliserons pour fixer le circuit de contrôle des moteurs www.cebekit.es...
- Page 19 C-9875 Figure 5- 2:Position des séparateurs Figure 5- 3:Circuit de contrôle une fois fixé www.cebekit.es sat@fadisel.com...
- Page 20 C-9875 Étape 6 - Suiveur de lignes noires Nous utiliserons: (1)Robot basique assemblé antérieurement (2)Module suiveur de lignes (3)Séparateur métallique M3 × 25 (4)Vis M3 × 10 mm (5)Outil nécessaire: Tournevis Figure 6 - 1:Pièces nécessaires www.cebekit.es sat@fadisel.com...
- Page 21 C-9875 Figure 6- 2:Module suiveur une fois fixé au séparateur Figure 6- 3:Module suiveur de ligne fixé au robot (vue par-dessus & par dessous). Attention à la position : Ne pas l’installé à l’envers. www.cebekit.es sat@fadisel.com...
- Page 22 C-9875 Étape 7: Câblage du robot intelligent 1. Connexion du porte piles Figure 7- 1:Câblage du porte piles Porte Pile Circuit type Arduino UNO avec le module Shield assemblé Câble ROUGE Terminal + (positif) du bornier d’alimentation Câble NOIR Terminal + (négatif) du bornier d’alimentation www.cebekit.es...
- Page 23 C-9875 2. Connexion des moteurs Figure 7- 2: Introduire les câbles des moteurs à travers le trou du centre du châssis acrylique et les faire remonter jusqu’au modules de contrôle des moteurs Moteur Moteur Gauche Droite Figure 7- 3: Connecter les câbles du moteur gauche à la partie gauche du module de contrôle des moteurs (bornes A1 et A2) et ceux du moteur de droite à...
- Page 24 C-9875 Étape 8: Connexion entre le module de contrôle des moteurs et le module Shield Figure 8 – 1 : Emplacement des contacts sur le module Shield Figure 8 - 2:Connecteur connecté sur le module Shield www.cebekit.es sat@fadisel.com...
- Page 25 C-9875 Figure 8 – 3 : Vue de l’autre extrémité du connecteur connecté au module de contrôle des moteurs. Attention à la polarité. Module de contrôle des moteurs Module Shield www.cebekit.es sat@fadisel.com...
- Page 26 C-9875 Connexion de l’alimentation du module de contrôle des moteurs Figure 8 – 4 : Pour l’alimentation du module de contrôle des moteurs il est nécessaire d’utiliser un câble spécial. À une extrémité il a deux connecteurs avec deux pins mâles accoudés qui sont connectés au bornier du module de...
- Page 27 C-9875 Figure 8 – 8: Vue de l’emplacement des terminaux sur el module Shield Ils sont indiqués sur le module comme : 9V (positif) et GND (négatif) Figure 8 – 9 : Connexion du câble sur le module Shield Attention à la polarité.
- Page 28 C-9875 Figure 8 – 10 : Vue du robot complètement terminé, où il est possibile d’apprécier la connexion de l’alimentation du module de contrôle des moteurs. Les couleurs des câbles peuvent varier selon le modèle photographié. Module de contrôle des moteurs...
- Page 29 C-9875 Étape 9: Connexion du capteur infrarouge Nous utiliserons le câble de 4 pôles qui dispose à une extrémité d’un connecteur mâle et à l’autre extrémité d’un connecteur femelle Figure 9 – 1:Il est nécessaire de passer le connecteur mâle à travers le trou rectangulaire du châssis acrylique.
- Page 30 C-9875 Figure 9 – 3 : Vue du connecteur et du capteur Figure 9 – 4 : Vue du capteur, bien aligné, la vis serrée. IL est possible d’apprécier la polarité de la connexion. www.cebekit.es sat@fadisel.com...
- Page 31 C-9875 Figure 9 – 5 : Emplacement des contacts sur le module Shield où nous connecterons le connecteur femelle du câble. Il est juste à côté du connecteur de l’alimentation du module de contrôle des moteurs Attention à la polarité...
- Page 32 C-9875 Mise en marche Ce robot suit n’importe quelle ligne foncée qui est marqué sur un sol blanc. Vous pouvez créer votre propre parcour en plaçant au sol un ruban adhésif noir de 15mm de largeur Si le sol n’est pas complétement blanc, il est recommandé d’utiliser un ruban adhésif de 20 à 25mm, dans la mesure où...
- Page 33 C-9875 PROGRAMACIÓN del ROBOT Software 1) En el caso de no disponer el programa ARDUINO, es necesario conectarse a la web https://www.arduino.cc/en/Main/Software y descargar el programa adecuado a tu ordenador. Para ello: 1) En cas de ne pas avoir le programme ARDUINO, il faut se connecter au siteweb https://www.arduino.cc/en/Main/Software...
- Page 34 C-9875 Schéma de la plaque de contrôle: www.cebekit.es sat@fadisel.com...
- Page 35 C-9875 Schéma du module Shield Il s’agit du schéma complet du module Shield Selon le kit choisit, seules certaines parties du module seront utilisées. www.cebekit.es sat@fadisel.com...
- Page 36 C-9875 Schéma du module de contrôle des moteurs www.cebekit.es sat@fadisel.com...
- Page 37 9.- Les piles rechargeables doivent être retirées de l’appareil avant d’être rechargées. Note: Arduino et autres marques enregistrées qui sont citée dans ce document sont propriété de leurs propres titulaires. Cebekit® est une marque enregistrée du Groupe Fadisel www.cebekit.es sat@fadisel.com...